This is a RobotStudio Smart Component to connect DI/DO to SIEMENS PLC using Snap7 library.
- Update ABB.Robotics.* References to Good RobotStudio SDK Version path with Project - Add Reference - Browse.
- On Project Properties:
- Application: Choose good .NET Framework version.
- Build Events: Post Build Events: Replace with the good LibraryCompiler.exe Path.
- Debug: Start External Program: Replace with the good RobotStudio.exe Path
This not work if project on network drive, let it clear.
- In \RSConnectDIOToSnap7\RSConnectDIOToSnap7.en.xml:
- Replace xsi:schemaLocation value with good one.
- Same for \RSConnectDIOToSnap7\RSConnectDIOToSnap7.xml.
- In $(RobotStudioPath)\Bin\RobotStudio.exe.config file:
- Add in section
<configuration><runtime><loadFromRemoteSources enable="true"/>
- Add in section
- Start first RobotStudio to get RobotStudio.exe.config loaded.
- Then attach its process in VisualStudio Debug - Attach to Process..
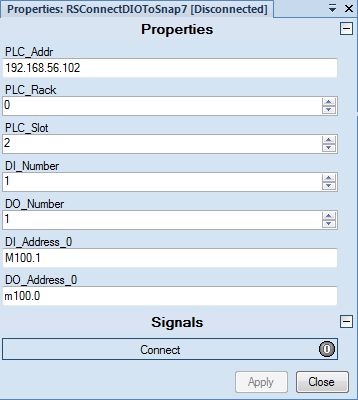
- PLC_Addr:
IP Address of PLC IPV4.
For PLCSim, you have to run NetToPLCSim and enter PC IP. - PLC_Rack:
S7_300 Rack=0
S7_400 See HW Config
S7_12xx/15xx Rack=0 - PLC_Slot:
S7_300 Slot=2
S7_400 See HW Config
S7_12xx/15xx Slot=1 - DI_Number:
Number of DI to connect to in Station Logic.
Change it to get DI appearing. - DO_Number:
Number of DO to connect to in Station Logic.
Change it to get DO appearing. - DI_Address_x: You can use: Ax.y Qx.y Mx.y DBx.DBXy.z
- DO_Address_x: You can use: Ex.y Ix.y Mx.y DBx.DBXy.z