ROSTango Instructions
These instructions require you to have followed the getting started wiki page: https://github.com/ologic/Tango/wiki/Getting-Started-with-Tango-and-ROS
> cd ~/rjandroid/src
> git clone https://github.com/ologic/Tango.git ROSTango
Once you have pulled down the ROSTango project, you can build it and run it.
> cd ~/rjandroid/src/ROSTango/ROSTango
> catkin_make
If this catkin_make fails, Troubleshooting ROSTango Build Failures might prove useful.
Source your workspace before starting Android Studio.
> source ~/rjandroid/devel/setup.sh
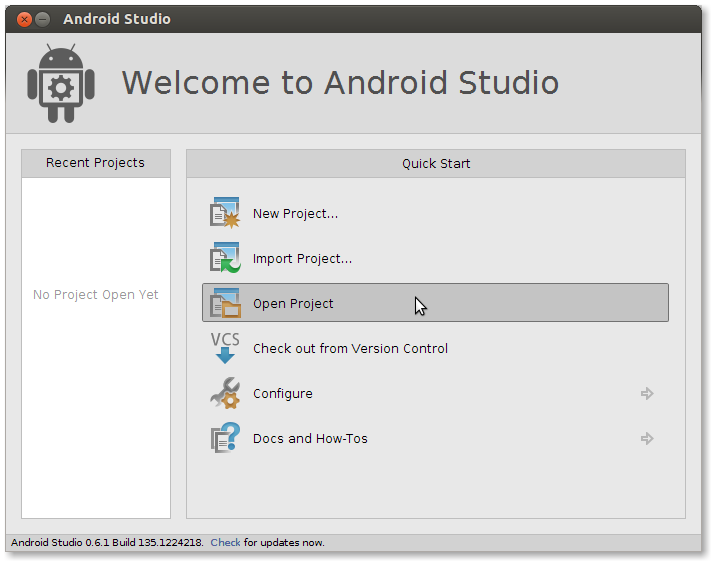
Next, start Android Studio, and close any open project with File -> Close Project.
> studio.sh
On the Welcome Screen, click on Open Project.
Navigate to <Root of Repository>/ROSTango/src/rostango/build.gradle and click OK.
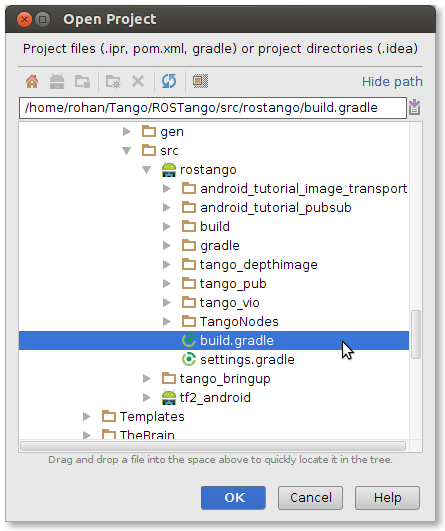
Keep the default options on the Import Gradle dialog and click OK.

If an Open Project popup appears, click Open Existing Project.

On the toolbar, select an app to build and run.

Connect your Tango device and click the Play button on the toolbar.

Before running the commands below, ensure your computer and the Tango device are on the same Local Network.
First, in a terminal, start a roscore instance.
> export ROS_IP=<Computer IP>
> export ROS_MASTER_URI=http://$ROS_IP:11311
> roscore
Then, in a new terminal:
> cd <Root of Repository>/ROSTango
> source devel/setup.bash
> export ROS_IP=<Computer IP>
> export ROS_MASTER_URI=http://$ROS_IP:11311
If you are using a Tango Phone (Peanut):
> roslaunch tango_bringup tango_vio.launch
If you are using a Tango Tablet (Yellowstone):
> roslaunch tango_bringup tango_vio_ys.launch
This will launch the necessary ROS nodes, as well as rviz for visualization of vio data. The launch scripts are different for Peanut and Yellowstone because the 3D models and axis setups are different on the phone and tablet. Make sure you're running the correct launch file for your device.
Now, on the Tango device, start the Tango Vio app, enter http://<Computer IP>:11311 as the Robot URI, and click Connect.
To view the ROS messages published by the Tango Vio app, try the following in a new terminal (press Ctrl-C to stop seeing messages):
> export ROS_IP=<Computer IP>
> export ROS_MASTER_URI=http://$ROS_IP:11311
> rostopic list
> rostopic echo /tango_pose
> rostopic echo /odom_visual
If this setup isn't working -- for example, you can't see any messages on /tango_pose or /odom_visual, or rviz isn't displaying any movement of the Tango device -- you might find Troubleshooting Problems Running ROSTango Apps helpful.
If you'd like to try visualizing depth data on Peanut, follow the instructions above, substituting the tango_depthimage app for the tango_vio app and tango_depth.launch for tango_vio.launch. Instructions for Yellowstone can be found here.
Some pictures of Vio running in ROS on the Phone (Peanut):

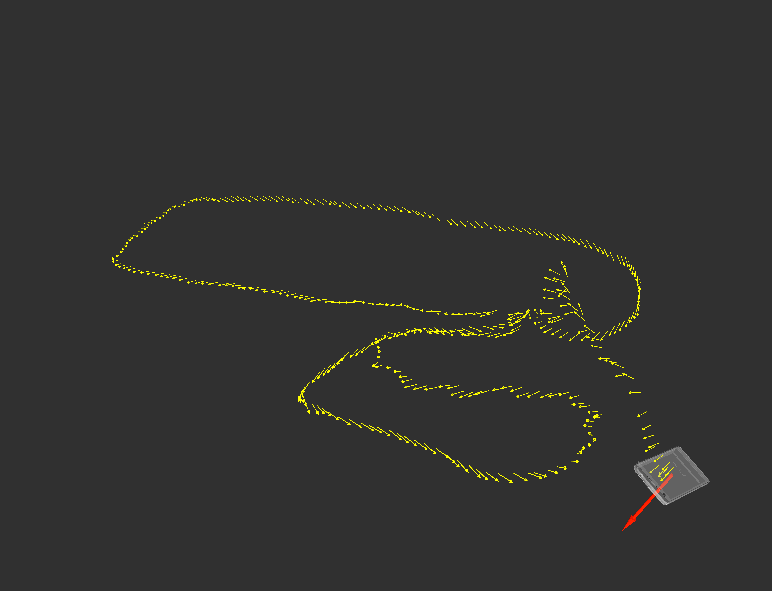

Video clips: