DARPA Subterranean Challenge ‐ Urban Dataset
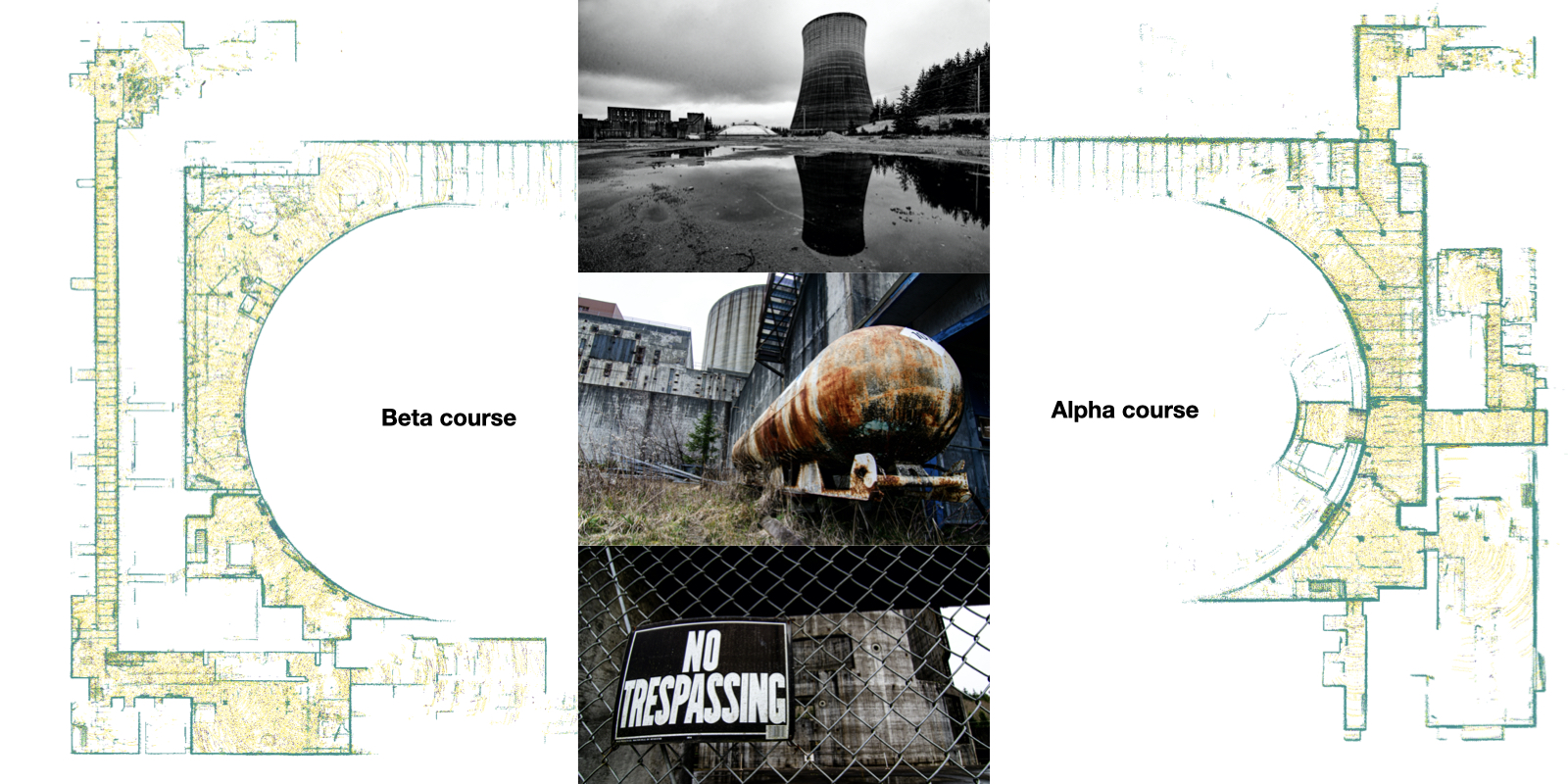
Here are the recordings of the robots of the CTU-CRAS-Norlab team during the Urban circuit of the DARPA Subterranean Challenge. The recordings are in rosbag format. There are recordings from four robots (ctu, dfki, husky and tno) over four courses (alpha 1, alpha 2, beta 1 and beta 2). Only the recording of the dfki robot in the beta 2 course is missing.